Plant Simulation15破解版一款功能强大的离散事件仿真软件,用于物流规划和制造生产量分析,同时它也是一款在进行离散事件仿真和价值流图设计时面向对象的3D建模工具。使用软件,既可以快速创建物流系统(如生产)的数字模型,以便您可以探索系统的特性并优化它的表现。
Plant Simulation是面向对象的、图形化的、集成的建模、仿真工具,系统结构和实施都满足面向对象的要求。可以对各种规模的工厂和生产线,包括大规模的跨国企业,建模、仿真和优化生产系统,分析和优化生产布局、资源利用率、产能和效率、物流和供需链等。允许您在不干扰现有生产系统的情况下运行实验和假设情景,或者 - 在规划过程中使用 - 早在安装实际生产系统之前。广泛的分析工具,如瓶颈分析,统计数据和图表,可以让您评估不同的制造方案。结果为您提供了在生产计划的早期阶段做出快速,可靠,智能决策所需的信息。新版本带来了诸多新功能和重要更改,包括各个方面,如模拟和动画相关的更改,带来了信息流对象的新特性以及新的3D功能,因此,当您在Tecnomatix Plant Simulation 15中打开它们时,您必须调整在先前版本的Tecnomatix Plant Simulation中创建的模拟模型。安装包中含破解文件,以及详细的安装激活图文教程!
3、将Client \ SSQ_UniversalLicenseServer_Module_SiemensPLM_ <release-date> .zip解压出来的Vendors文件夹复制“SolidSQUAD_License_Servers”文件夹
6、好了,以上处理完成后,现在我们来安装安装Plant Simulation软件,加载Plant.Simulation.15.0.0.Full.Win64.iso镜像,然后双击PlantSimulation64bit.msi运行,如图所示,稍等一会儿
11、然后我们回到破解文件夹中,找到Siemens.Tecnomatix.Plant.Simulation.15.0.0.Win64-SSQ\_SolidSQUAD_\Client下的Tecnomatix Plant Simulation 15文件夹,将内容复制到软件安装目录中(默认路径为C:\Program Files\Siemens\Tecnomatix Plant Simulation 15),记得替换目标中的文件
输入“端口”:27800

Plant Simulation新功能
一、Plant Simulation15.0的重要变化
1、我们将对象AGVPool添加到资源对象。 您可以使用它为您的安装创建未绑定到固定路径网络的自动导引车辆。
我们还添加了标记对象。 您可以使用它来设置AGV从AGVPool驱动到其目的地的航路点。
注意
在当前版本中,SankeyDiagram不记录AGV,它不受固定路由网络的约束。
2、我们添加了CostAnalyzer对象。
为了便于成本分析,我们还将选项卡成本添加到物料流对象,选项卡成本到零件和容器。
注意
CostAnalyzer和选项卡成本是专业许可证中可用的成本。
二、模拟和动画相关变化15.0
1、我们更改了DataTable方法删除的行为。如果激活了设置列索引属于以前版本中的内容,则以下说明也删除了列索引:
DataTable.delete({“ColumnB”,*})
由于这是意外行为,并且仅在极少数情况下需要,因此Plant Simulation不再从版本15开始删除列索引
如果您还想删除列索引,则必须使用以下指令显式包含列索引:
DataTable.delete({ “ColumnB”,0} .. { “ColumnB”,*})
范围定义{“ColumnB”,*}现在仅设置DataTable的内容。如果索引属于该格式,则不再包含该索引。
2、我们更改了DataTable的方法appendRow的行为。在以前的版本中,如果DataTable具有激活的行索引,则该方法会覆盖一行,如果DataTable仅包含行索引中的单个条目。事实并非如此。
3、我们更改Exporter和Worker的控件的调用顺序。在以前的版本中,可能会发生Order控件在Exporter的Release控件之前执行,或者在移动MU时在Worker的Release控件之前执行Order控件。在此上下文中,Entrance控件和Order控件的调用顺序也发生了变化。从此版本开始,在Order控件之前执行Entrance控件。
4、我们改变了商店外观类型> Floorspace图形的腿部。这些现在也有一个方形的足迹。这可能会导致模型中的不同模拟结果,其中工人走到商店下面并且您选择了工人障碍物>图形。
三、Plant Simulation15.0的新功能
1、为了便于使用CostAnalyzer进行成本分析,我们将选项卡成本添加到物料流对象,选项卡成本到零件和容器,以及选项卡成本到工人。
2、我们将设置工件托架添加到Container。您可以使用它来对零件从加工站运输到您工厂的加工站的载体进行建模。统计数据不会收集承运人的价值,而是收集运输部件的价值。在以前的版本中,实现起来很麻烦。此设置还会影响部件的布线。
3、我们将“选项卡”菜单添加到物料流对象。如果隐藏不需要的选项卡,Plant Simulation会更快地打开对话框,您可以在日常工作中更快地更改这些选项卡
4、我们将复选框预订点添加到传感器的设置中。它设定部件的预订点触发传感器。
我们还在此上下文中更改了传感器的对话框,并将属性BookPosition,事件SensorBookPos添加到事件列表,将可选参数BookPos添加到传感器控件。
5、我们将菜单命令Random Seed Value添加到物料流对象的工具菜单和流体对象,这些物体可以创建随机数。要更改随机种子值,请选择该命令并在对话框中键入另一个值。
6、我们将只读属性CurrentDestinationAngle添加到转盘。
7、我们使MU的只读属性FrontLocation和RearLocation可观察。
四、更改了Plant Simulation 15.0中的功能
1、我们更改了对象Track的默认图标。它现在看起来像这样。
2、我们在装满ParallelStation时更改了设置开始处理的行为。如果不必设置ParallelStation,ParallelStation现在也可以接受不同类型的部分,而不会过早地开始处理它们。对于类型相关和位置相关的处理时间或当您输入公式作为处理时间时,零件可以具有不同的处理时间。
3、我们使属性EntranceFree可观察。对于具有激活设置的ParallelStation启动处理时,如果并非所有已处理部件都已退出工作站,则属性EntranceFree现在返回false。
4、我们更改了Transporter的行为:在以前的版本中,Plant Simulation在Transporters发生碰撞时分别重置现有的TargetPosition或TargetDistance并显示错误消息。
从此版本开始保留TargetPosition / TargetDistance,并且Transporter通过Transporter与第二个Transporter碰撞的速度/加速度驱动它们。如果无法到达TargetPosition / TargetDistance,因为第二个转运蛋白与之碰撞的第一个转运蛋白在此之前停止,也会保留TargetPosition / TargetDistance。一旦第一辆运输车再次开始行驶,第二辆运输车就会尝试到达TargetPosition / TargetDistance。
5、我们更改了转运器的行为:当您设置必须更改方向的TargetPosition时,对于在退出控件中激活加速的未停止的转运器,Plant Simulation现在会显示错误消息,因为没有打破的空间,直到转身为止。
6、如果MU具有多个Out事件,我们更改了Buffer的行为,因为您使用方法outIn设置了此事件。在以前的版本中,Plant Simulation为下一个MU计算了一个新的Out事件,并覆盖了当第一个MU退出Buffer时使用该方法创建的事件。如果MU尚未具有Out事件,则从Plant Simulation上的此版本仅计算下一个事件的Out事件。
7、我们将可选参数DropPosition和DropLane添加到面向长度的对象的拖放控件中。它们指定物体掉落的位置和TwoLaneTrack上的通道。
8、我们将可选参数IgnoreRouteWeightingAttr添加到Part / Container的方法getRouteLength和Transporter的getRouteLength方法中。如果路由权重属性将被忽略(true)或者是否将被使用(false),则参数设置。
9、我们更改了Frame的属性AxesOrigin的数据类型。在以前的版本中,它是一个二维数据类型数组,有两个值(real [2])。从这个版本开始,它是一个数据类型为整数的二维数组,有两个值(整数[2])。
五、Plant Simulation 15.0中的新功能和更改功能
1、我们将方法addContent和setCurrentContent添加到Mixer中。
2、我们更改了Tank的方法setCurrentContent的行为。 现在,您可以在Tank不为空时设置新材料。
3、我们将对象AGVPool添加到资源对象。 您可以使用它为您的安装创建未绑定到固定路径网络的自动导引车辆。
4、我们将对象标记添加到资源对象。 您可以使用它来设置AGV从AGVPool驱动到其目的地的航路点。
注意
在当前版本中,SankeyDiagram不记录AGV,它不受固定路由网络的约束。
5、我们更改Exporter和Worker的控件的调用顺序。 在以前的版本中,可能会发生Order控件在Exporter的Release控件之前执行,或者在移动MU时在Worker的Release控件之前执行Order控件。 在此上下文中,Entrance控件和Order控件的调用顺序也发生了变化。 从此版本开始,在Order控件之前执行Entrance控件。
六、信息流对象的新特性
1、我们将命令Manage Breakpoints添加到Method Editor中。 我们还将命令Breakpoint Active和Breakpoint Settings添加到Method Debugger。
2、我们添加了一个组合键以删除所有断点,包括EventDebugger中的断点:要执行此操作,请在单击“删除所有断点”时按住Shift键。
3、我们将设置模拟模式添加到对象PLCSIM_Advanced。 您可以使用它来实时或逐步地与PLC执行数据交换。
4、我们将命令Open Debugger添加到Frame中Method的上下文菜单中。
5、我们将方法getColumn添加到对象SQLite中。
七、更改了信息流对象的功能
1、我们更改了预格式化方法的创建方式。以前这些是使用SimTalk-1.0语法创建的,如果在InformationFlow文件夹中的Method类中禁用了New Syntax。从现在开始,预先格式化的方法总是使用SimTalk-2.0语法创建。
2、我们更改了对象Method的方法executeIn和executeNewCallChain以及数据类型方法的用户定义属性的行为。在被叫方法中的匿名标识符?现在引用调用者,即包含executeIn或executeNewCallChain方法的Method,或者如果调用者是数据类型方法的用户定义属性,则它引用此用户定义属性的位置。
在以前的版本中,匿名标识符?为executeIn引用了EventController。对于executeNewCallChain的匿名标识符?在以前的版本中是VOID。
3、我们更改了AttributeExplorer的行为。现在,结果表根据路径,名称或标签进行排序。与以前的版本一样,AttributeExplorer首先显示您指定的对象的数据,然后显示查询定义的数据。
在以前的版本中,显示结果的顺序取决于将对象插入模型的顺序。之后不再可再生。
4、我们更改了DataTable的行为。创建新模型时,默认情况下会禁用“设置列索引属于内容”设置。对于新模型,列索引属于该格式,因此在停用内容的继承时将继承该列索引。
5、我们增强了DataLists和DataTables的writeFile和writeObjectFile方法的功能。对于这些,您现在也可以输入System作为可选参数CodePage的ANSI等效项。
6、我们在对象SQLite的方法步骤中添加了可选参数。
7、我们向对象SQLite的方法executeStatement添加了返回值。
8、我们从对话框文本文件格式中删除了已分配内存的设置。
9、我们从Method-Editor中删除了命令工具>视图>工具提示包含类型信息。现在,带有完成的Show Tooltip命令始终显示类型信息。
10、我们不再支持Method的只读属性InheritsProgram。相反,您可以使用属性getAttribute的泛型访问。
八、用户界面对象的新功能和更改功能
1、我们添加了CostAnalyzer对象。
为了便于成本分析,我们还将选项卡成本添加到物料流对象,选项卡成本到零件和容器,以及选项卡成本到工人。
2、我们在对象对话框的命令“新建复选框”中添加了“继承”复选框。
3、我们增强了图表框架中“显示”设置的行为。它现在提供3D图像质量,只要3D被激活。
4、我们更改了HtmlReport的行为。
它现在根据对象名称进行排序。假设您使用指令[current,%States]显示当前Frame中所有对象的统计数据的表。然后,报告根据对象名称对对象顺序进行排序。
如果使用[.MaterialFlow.Drain *]指令显示所有Drains,报告将根据其名称对Drains的顺序进行排序。
5、我们更改了HtmlReport的行为以收集和显示对象实例,比较收集对象实例和在报告中显示它们。
6、我们将GanttChart添加到HtmlReport的对象中,比较Display a GanttChart。
7、我们将方法exportChart添加到GanttChart。
8、我们将方法getPartFlowData添加到SankeyDiagram。
九、新的和更改的SimTalk功能
1、我们将方法asObject添加到数组中。
2、我们将方法连接添加到数组中。
3、我们将方法pop添加到数组中。
4、我们更改了Plant Simulation显示空数组的方式。现在显示括号之间的空格,如“[]”。在以前的版本中,它们显示时没有像“[]”这样的空白空间。
这也会影响全局函数to_str:
var a:real []
var s:string:= to_str(a) - s:=“[]”
5、我们更改了相等运算符和数组运算符不相等的行为。
在以前的版本中,如果数组的数据类型不同,则等于运算符总是计算值false。假设将数据类型为real的数组与数据类型长度的数组进行比较,即使值相同,Plant Simulation也始终计算为false。
如果将数据类型any的数组与没有数据类型any的数组进行比较,则结果也始终为false。
从版本15开始,此行为适用:
比较不同数据类型的数组时,Plant Simulation会在以下情况下创建运行时错误并打开方法调试程序:
◦根据内容的数据类型实际,长度,时间,速度和重量。
◦数据类型any的阵列也会根据其内容与其他阵列进行比较。
无法将数据类型为整数的数组与数据类型实数,长度,时间,速度或权重的数组进行比较。
6、我们更改了函数throwRuntimeError的行为:如果方法不作为子例程运行,即,当不存在调用者时,Plant Simulation会在包含函数throwRuntimeError的位置打开Method调试器。如果方法已加密,Plant Simulation将打开一个消息框,显示消息。
7、我们将泊松分布参数Lambda的上界从700扩展到无限。但参数Lambda的值必须大于0。
8、我们更改了Uniform分布的分布参数的名称:在以前的版本中,它们被称为Start和Stop。从这个版本开始,它们被称为下界和上界。
十、杂记
1、我们改变了工具箱的外观。
2、我们更改了统计报告的外观。它显示的数据是相同的。
3、我们将设置订阅添加到对话框首选项的选项卡许可证中。
4、我们向Frame添加了只读属性NumberOfLimitedObjects。它计算每个使用帧的学生许可证中可以使用的对象数。
5、我们更改了Profiler显示的数据:
◦除了方法执行的总时间,它现在显示百分比
◦此外,我们现在还显示3D渲染的总CPU时间和工作路径网络计算的百分比。
6、我们更改了窗口显示属性和方法的外观。现在,“继承”列显示了对于继承的属性,方法和只读属性的✔,以及 - 对于未继承的属性,方法和只读属性。在以前的版本中,该列显示i为继承而ni为未继承。
此外,您现在可以通过单击正在编辑的值的继承切换按钮来更改属性值的继承。
注意
这不适用于遗传算法的对象。
7、我们更改了“显示属性和方法”窗口的行为。它现在只显示具有SimTalk函数的德语名称的列:
您正在使用运行德语版Windows的计算机。
您选择德语作为模拟模型的模型语言。
•我们删除了复选框Tooltip包含对话框文件>首选项的选项卡编辑器中的类型信息。现在,带有完成的Show Tooltip命令始终显示类型信息。
•我们将可选参数CanInherit添加到属性getAttribute。如果可以继承属性的值,则返回它。
•我们将可以分配的值的数据类型添加到属性的语法描述中。
我们将返回值的数据类型添加到只读属性的语法描述中。
十一、新的3D功能
1、我们将命令Optimize Model添加到Home Ribbon选项卡。
2、我们在3D视图功能区选项卡中添加了“显示天空”命令。
3、我们将子命令Mezzanine添加到命令“插入形状”。
4、我们将子菜单Transformation Inheritance添加到多个选定对象的Context菜单中。
5、我们在对话框导入图形中添加了优化设置。
6、我们在第一个踏板上添加了复选框Start to the object Stairs。选择它以使楼梯在第一个胎面处开始,而不会将纵梁延伸到楼梯所在的地板上。
7、我们将可见图形和可见图形的边界框设置添加到工人的障碍物中。
8、我们在对话框Show Obstacles中添加了障碍物的数量和产生的角点数。障碍物和顶点的数量影响最短路线的计算。
9、我们添加了3D形状的属性,只读属性和方法。
10、我们添加了图形材质的属性,比较了对图形的详细访问。
11、我们将3D中连接器的行为与其在2D中的行为相匹配,这意味着您现在还可以插入锚点。
◦命令Transformation Inheritance的子命令Inherit Positions现在还激活连接器锚点的继承。
◦现在,您还可以使用位置操纵器编辑连接器的锚点。如果未在场景中选择任何内容,则如果场景中显示连接器,则“显示操纵器”命令还会在场景中显示“连接器”的位置操纵器。
12、我们添加了属性_3D.getAttribute。
13、我们添加了只读属性_3D.getWorldCoordinate。
14、我们将可选参数Offset添加到方法_3D.getPositionOfObject。
15、我们向方法createCuboid添加了两个可选参数。您可以使用它们在创建的长方体周围添加彩色线条。
十二、更改了3D功能
•我们更改了规划视图的外观:
◦我们现在默认显示没有颜色渐变和白色的框架背景。如果为打开的Frame或文件夹设置了自己的颜色,则情况并非如此。
◦现在我们总是显示网格,与网格设置无关,没有底板。
•我们改变了仅3D模型的行为:
在仅3D模型中,2D和3D之间的位置和旋转现在始终是同步的。过去,您无法停用2D和3D之间的位置和旋转之间的连接。虽然通过SimTalk仍然可以,但是当将模型类型切换为仅3D时,现有模型仍保留其关于位置和旋转连接之间的现有连接的状态。
新行为具有以下效果:
◦加载在先前版本中创建的模型时,长度导向对象的位置,旋转和锚点将根据3D中的数据进行强制同步。
◦仅在将模型类型切换为3D时也会出现同样的情况。
◦SimTalk访问属性_3D.RotationsConnected和_3D.PositionsConnected不会在调试器中导致错误。但是分配被忽略,并且Plant Simulation现在总是在查询时返回一个常量值。对于位置,返回值始终为true,对于旋转,在大多数情况下都是如此,具体取决于对象类型。在某些特殊情况下,例如对于Variable,返回值为false。
•我们在您选择MU实例和工作线实例时更改了行为。 Plant Simulation现在不再在3D中按窗口选择这些,但总的来说。在大多数情况下,这没有任何直接的可见效果。
但是,当打开多个3D窗口并且这些3D窗口显示相同的帧或同一帧的不同部分时,您可以看到差异。然后,当一个实例在3D中被选中并且在该窗口中也可见时,该实例将被视为在窗口中被选中。与以前的版本相比,您现在还可以在一个窗口中选择MU并在另一个窗口中取消选择它。
•我们在激活锁定结构时更改了行为。按住Alt键时,Plant Simulation将选择您单击的对象。如果不按住Alt键,Plant Simulation将选择插入模型中的Frame实例。
•当您使用矩阵加载空间Transporter和Buffer从对象的图形创建新的可动画对象时,我们更改了行为。然后,Plant Simulation通过创建的可动画对象的物理大小创建MU动画区域。
•我们更改了可以交互式打开的3D窗口的数量。在以前的版本中,您可以打开32个3D窗口,从版本15开始,您只能打开30个
•我们简化了对3D形状的SimTalk访问和对图形的详细访问。我们还添加了许多新属性和方法。
•我们终止了对方法_3D.MUAnimations.Animation.cancelRedirection,_3D.MUAnimations.Animation.isRedirected和_3D.MUAnimations.Animation.redirectTo的支持。我们建议将属性_3D.AnimationObject与其他可设置动画的对象一起使用。
•我们更改了3D图形的显示:如果由于您为屏幕覆盖阈值设置的值而隐藏了3D图形,则整个数字显示现在被视为不可分割的图形,这意味着Plant Simulation要么显示整个数字,要么显示任何内容所有。在以前的版本中,每个数字都被单独处理,例如,导致隐藏小数点。
选择OpenGL 4.3或更高版本且具有适合此功能的图形卡时,Plant Simulation现在使用不同的模式处理堆叠的透明胶片,例如在另一个半透明窗口前面的半透明窗口。
•我们更改了命令Make Animatable Object和Make Simulation Object的行为:如果命令Lock Structure对于其中一个相关的帧处于活动状态,则在视图中调用它们时将不会执行这些命令。
•我们在导入图形时更改了行为,图形由多个文件组成。当Plant Simulation现在找不到对文件的引用时,它会取消整个图形导入并显示错误消息。
•我们更改了> Floorspace类型的商店图形的腿的外观。现在这些都是正方形的。这可能会导致模型中的模拟结果发生变化,其中工作人员走到商店下方并为其选择了“工人”>“图形”的“障碍”。
•我们改变了Rack的行为。它的框架不再造成工人障碍。
•我们更改并增强了命令Optimize Selected Graphic的设置。
•我们增强了命令Move to Zero的行为。它现在也适用于JtTriStripSets。这些是图形节点,它们没有任何子节点,通常包含导入的图形。
•我们增强了命令Show Manipulators的行为。您现在还可以为框架显示它们。我们还将命令Show Manipulators和Hide Manipulators组合到一个命令中。
•我们更改了属性_3D.Dimensions的行为。您不能再将负尺寸指定给商店。
•我们在Pose Editor中增强了鼠标滚轮的行为。现在,您还可以在选项卡Poses上输入关节的上限或下限时使用鼠标滚轮。
•我们在编辑姿势时更改了行为。这些不再显示为橙色。
•我们增强了edddison界面的行为。定义边界框时,现在还可以设置其名称及其高度。
软件功能
1、零件规划与验证
Tecnomatix 零件规划和验证(Part Planning and Validation),是对零部件和用来制造这些零件的工具制定生产工艺,如NC编程、流程排序、资源分配等,并对工艺流程进行验证。具体应用包括创建数字化流程计划、工艺路线和车间文档、对制造流程进行仿真、对所有流程、资源、产品和工厂的数据进行管理、为车间提供NC 数据等,提供了一个规划验证零件制造流程的虚拟环境,有效缩短了规划时间,并大大提高了机床利用率。
主要产品有:零件制造规划器、加工线规划器、冲压线仿真、虚拟机床、连接到生产
2、装配规划与验证
Tecnomatix装配规划和验证(Assembly Planning and Validation),提供一个虚拟制造环境来规划验证和评价产品的装配制造过程和装配制造方法,检验装配过程是否存在错误,零件装配时是否存在碰撞。它把产品、资源和工艺操作结合起来来分析产品装配的顺序和工序的流程,并且在装配制造模型下进行装配工装的验证、仿真夹具的动作、仿真产品的装配流程,验证产品装配的工艺性,达到尽早发现问题、解决问题的目的。
主要产品有:Jack和流程人体仿真、流程仿真(Process Simulate)、流程设计器、基于Web的BOP管理器(Web-based BOP Manager)、制造流程规划器(Teamcenter Manufacturing Assembly Author)
3、人工智能及自动规划
Tecnomatix 的机器人与自动化规划解决方案提供了用于开发机器人和自动化制造系统的共享环境。此解决方案能够满足多个级别的机器人仿真和工作单元开发需求,既处理单个机器人和工作台,也能处理完整的生产线和生产区域。
主要产品有:流程设计器、流程仿真、Robcad
4、工厂设计及优化
Tecnomatix 的工厂设计和优化解决方案提供基于参数的三维智能对象,能更快地设计工厂的布局。通过利用虚拟三维工厂设计和可视化技术进行工厂布局设计,并能对工厂物流进行分析和优化,产量仿真,提高在规划流程中发现设计缺陷的能力,不至于等到进行工厂现场施工才发现问题。物料流、处理、后勤和间接劳动力成本都可以使用材料流分析和分散事件仿真得到优化。
主要产品有:FactoryCAD、FactoryFlow、工厂仿真、关联环境编辑器
5、质量管理
Tecnomatix质量管理解决方案将质量规范与制造和设计领域(包括流程布局和设计、流程仿真/工程设计以及生产管理系统)联系起来,从而确定产生误差的关键尺寸、公差和装配流程。
主要产品:尺寸规划与验证、误差分析(VSA)、CMM检查
6、生产管理
生产管理解决方案将PLM扩展到了制造车间,可实时收集车间数据,优化生产管理。涉及到的领域包括制造执行系统(MES)——用于监视正在进行的工作、控制操作和劳动力,并反馈生产数据;人机界面(HMI)及管理控制和数据采集(SCADA)——从工厂收集设备之类的实时信息,反馈给上游的系统。
主要产品:MES、HMI/SCADA、FactoryLink Supervisory Control and Data Acquisition
7、制造流程管理
制造流程管理是Teamcenter的一个功能模块,主要是对制造数据、过程、资源以及工厂信息进行管理,为流程管理建立基础。
主要产品:资源管理、Teamcenter制造访问、Teamcenter制造发布
从以上Tecnomatix的解决方案可以看出,Tecnomatix不仅实现了工艺设计、工艺验证优化等功能,而且Teamcenter的MPM可管理工艺信息。通过Tecnomatix、NX、Teamcenter及SIMATIC IT整合集成,为企业提供了一套端到端的数字化制造解决方案。
面向对象的层次化模型
物流系统三维可视化
创建包含多达 1000 个对象的模型
分析工具的完全访问权限
生成报告
软件特色
1、使用2D和3D统计模拟分析生产系统
Tecnomatix Plant Simulation软件提供离散事件模拟和统计分析功能,以优化物料处理,物流,机器利用和劳动力需求。 使用具有面向对象和3D建模功能的随机工具,您可以提高制造精度和效率,同时提高吞吐量和整体系统性能。 强大的图形可视化,图表和报告功能,遗传算法和实验工具使您能够评估生产系统的行为,从而做出快速,可靠的制造决策。
2、消除瓶颈并简化吞吐量
Tecnomatix Plant Simulation模型用于简化吞吐量,缓解瓶颈并最大限度地减少在制品。用于自动瓶颈检测,吞吐量分析,机器利用率,资源和缓冲区,Sankey图和甘特图的图形输出是评估生产系统性能的众多工具之一。仿真模型考虑了内部和外部供应链,生产资源和业务流程,使您能够动态分析不同生产变化的影响。
3、优化能源使用以提高绩效
通过采用仿真模型验证的措施,优化现有生产系统的性能和能源使用。 Tecnomatix Plant Simulation包括一个集成的能量分析仪,可显示当前,最大和总能量消耗。集成的能量绘图仪可动态显示模拟过程中的能耗,使您能够在工作时间和预定休息时间内查看能源使用情况。您可以以图形方式显示能耗,轻松识别潜在节能领域。
4、在启动之前实际调试生产系统
Tecnomatix Plant Simulation使工厂的虚拟模型与实际工厂控制相关联,以模拟实际生产。通过这种集成的仿真方法,可以测试和优化控制,自动化,材料运输和整个工程操作。可以连接来自真实环境的虚拟(软件)可编程逻辑控制器(PLC)或实际(硬件)PLC。该调试解决方案灵活,开放,可与任何PLC配合使用。
使用帮助
一、介绍3D
--------------------------------------------------------------------------------
3D参考帮助>3D参考>3D介绍>3D介绍
3D区分模拟对象,可设置动画的对象,图形组,状态组,状态图形和所选对象的图形。
就像模拟对象框架一样,每个可动画对象又可以包含其他可动画对象。
模拟对象在2D中具有对应项,即如果激活了对话框中的复选框,则会在主页功能区选项卡上单击“3D属性”>“在3D中创建”复选框,从而通过其名称与2D模拟对象连接。连接的2D和3D模拟对象在模型层次结构中具有相同的位置,并且可以共享一些常见数据,如位置。“显示3D图形结构”对话框以树形结构显示图形,可以显示3D模拟对象,但不显示此模拟对象的内容。要查看Frame类型的模拟对象包含的其他模拟对象,必须打开框架的显示结构对话框。
可动画对象在2D中没有对应物。就像模拟对象一样,它们具有许多描述它们的属性,并且可以通过SimTalk命令进行控制。它们仅用于3D的可视化目的,例如用于控制机器人。就像模拟对象框架一样,每个可动画对象又可以包含其他可动画对象。
图形组定义3D对象的可能可视化表示,并具有该对象唯一的名称。这类似于模拟对象的2D图标。您可以将图形组定义为外部或内部。外部图形组表示朝向外部的3D对象,而内部图形组仅在3D对象内部可见(除非您选中复选框显示内容)。
可以永久显示或隐藏图形组,以便在备用图形组之间切换。每个模拟对象或可动画对象至少包含一个名为default的外部图形组,以及可选的任意数量的替代或附加图形组,您可以相互独立地显示或隐藏它们。图形组的可见性是3D对象属性,可以继承该对象属性以及整个图形结构。您可以在“编辑3D属性”对话框的“选项卡图形”上创建,删除或替换图形组。
状态组是生成的状态图形组,可以显示为模拟对象预定义的所有状态。您可以在“编辑3D属性”对话框的“选项卡图形”上创建,删除或替换状态组和基础状态图形。
状态图形对应于PlantSimulation2D中的LED。每个状态图形都是状态组的子图形,它可以显示其命名的对象状态,并且与2D中的相应LED具有相同的颜色。只要在2D中显示相应的LED,工厂模拟就会显示它们。请注意,可以同时显示多个状态图形。
图形是图形组,状态组或状态图形中的所有视觉/几何元素和几何元素组,它们描述了该组的整个形状。
PlantSimulation使用3D来三维可视化和修改仿真模型。您可以通过不同方式访问数据:
•您将在3D提供的对话框中输入和选择与3D有关的设置。
•有时您可能想要在3D中创建图形。
•有时您可能只是喜欢使用该程序,即PlantSimulation,您习惯于输入和选择模拟相关设置。
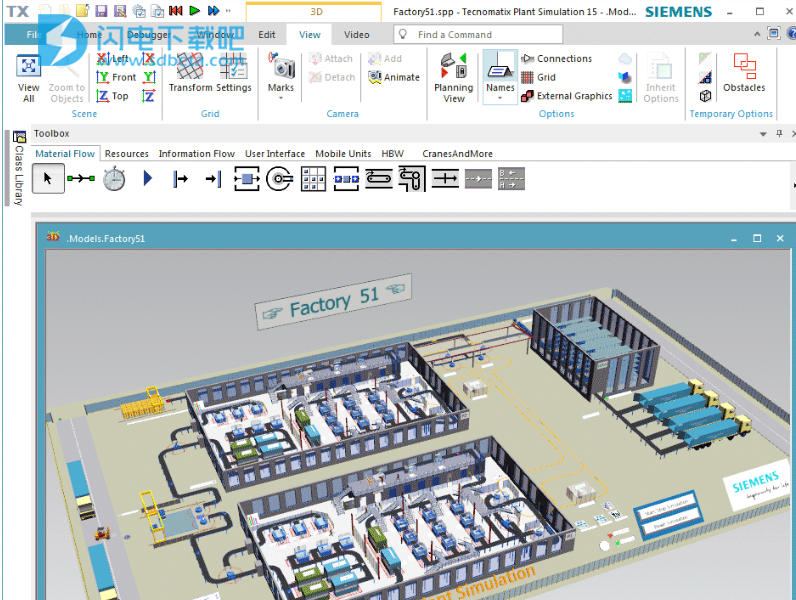
二、查看3D样本模型
--------------------------------------------------------------------------------
3D参考帮助>3D参考>3D介绍>查看3D样本模型
成功安装PlantSimulation后,您可以查看属于程序包的样本模型之一,以获得有关3D可以执行的操作的第一印象。
•启动您购买的PlantSimulation(开发,应用程序)版本。
•单击“起始页”上的“示例模型”。然后单击ExampleModels下的Factory51。这将打开模型文件。
•要开始模拟,请单击“重置模拟”,然后单击“主页”功能区选项卡上的“开始/停止模拟”观察PlantSimulation中的模拟如何仅在稍微延迟的时间内控制3D窗口中移动对象的动画。
•要停止模拟,请单击“主页”功能区选项卡上的“启动/停止模拟”。
注意
另请查看位于安装PlantSimulation的文件夹中的示例文件夹中的其他示例模型。
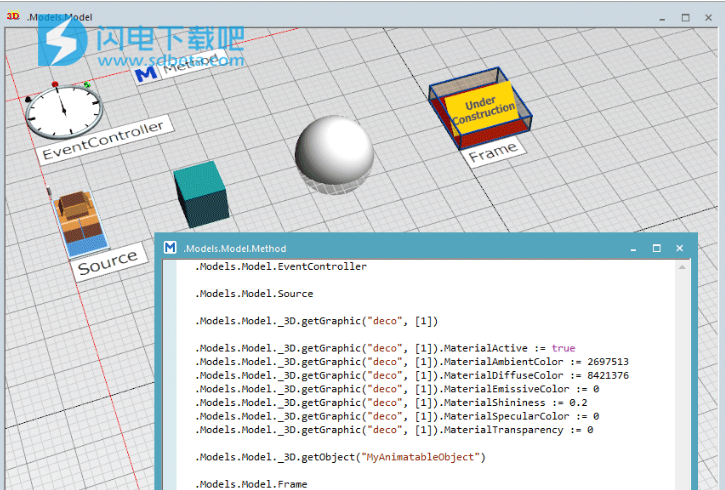
三、SimTalk访问3D
--------------------------------------------------------------------------------
--------------------------------------------------------------------------------
•要复制所选对象的路径,请在框架中按Ctrl+C.然后切换到Method并按Ctrl+V粘贴路径。这是我们在示例中继续使用对象EventController,Source和Frame的方式。
•要复制所选锐利的当前材质设置,请按框架中的空格键并切换到选项卡材质。激活材质并单击,以复制当前材质设置。然后更改为方法,按Ctrl+V粘贴材质设置。这就是我们在示例中继续使用Cuboid的方式。
 离散事件仿真软件 Siemens Tecnomatix Plant Simulation 15.2.1中文 X64
离散事件仿真软件 Siemens Tecnomatix Plant Simulation 15.2.1中文 X64